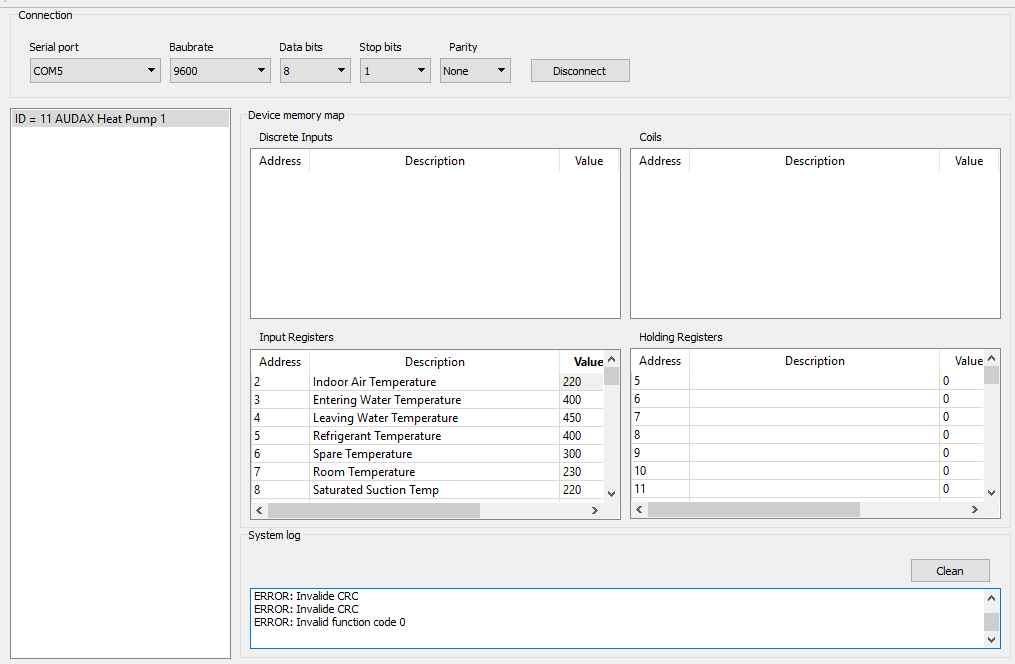
Colleagues, I have a question: the program that I use to emulate several Modbus Slave devices generates errors when receiving packets from the T3 controller: “Invalid function code 0” and “Invalid CRC”. I guess that is not maintained interval of silence, at least 3.5 characters at the beginning of the message and 3.5 characters at the end. Please check their availability and reply to this message. Thank.