Here’s what we do have, I know we can do more so do let us know what features you’d like to see.
The T3 controllers as well as the T3E expansion modules support priority array and relinquish defaults for the outputs. This is explained more in the forum here:
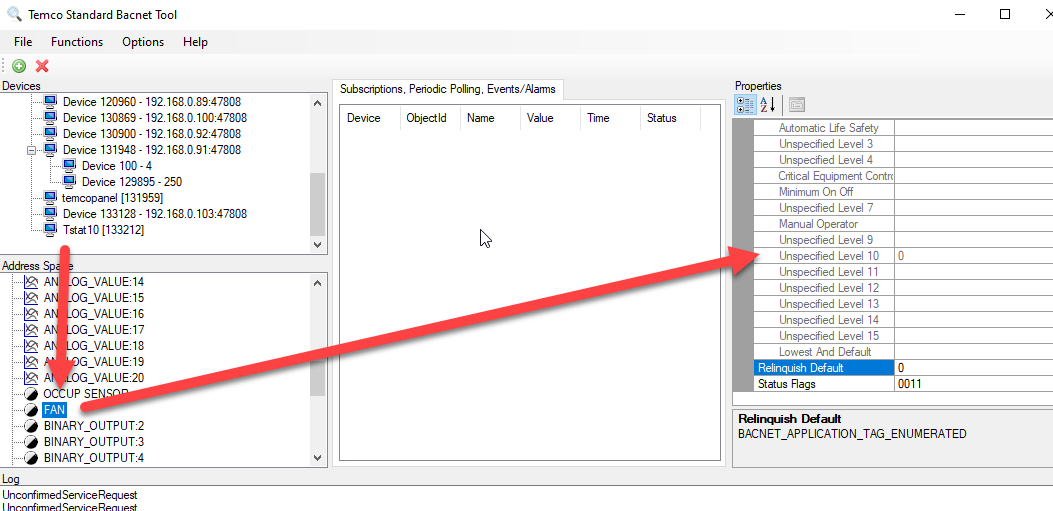
And here’s a view of the priority array using T3000 → Tools → Bacnet Tool (Yabe). Currently the output is in auto mode and the program running on the thermostat is in charge of the output at priority 10. You will see the array change if you put the output into manual mode or move the switches on the controller if it has the override switches.
The relinquish default value is also there, the controller will set the output to this value if the dead master feature is in use. Currently the only way to get at the dead master feature is to write a modbus register,
ToBeDone: Expose the dead master setting to Bacnet
ToBeDone: Document the modbus register for the deadmaster feature
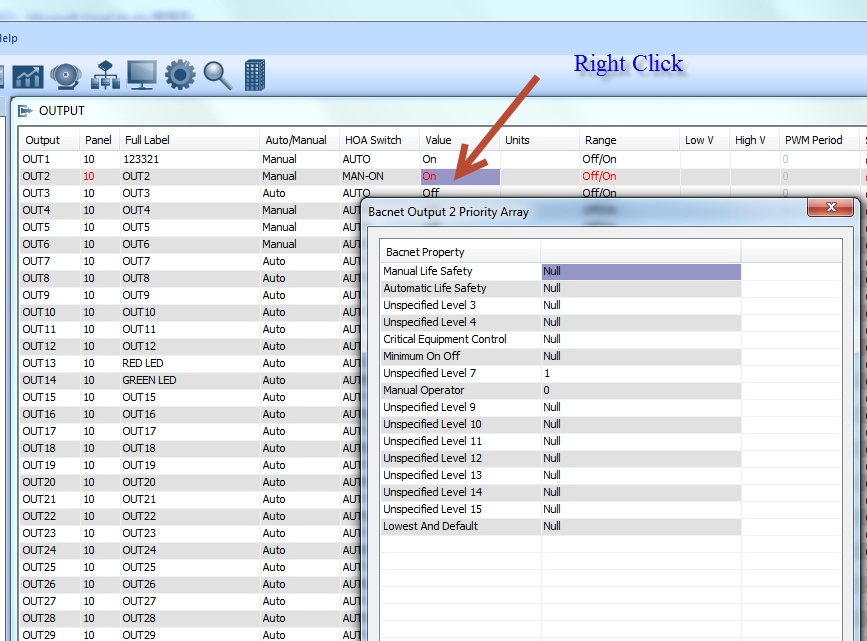
[08/2020 Update] You can see the priority array from the T3000 interface now by right clicking on a particular output, this is a ‘view only’ dialog.
You can write to the outputs from an external master and the devices will assume priority level 11 for network commands. This means the local program in the controller will have precedence over programs running on external masters. (Easier to debug systems this way). If you need an external program to be in total control then you can turn off the local programs or use the external master to write to a VAR and incorporate that into the local program.
We dont (yet) have priority array implemented on the other bacnet objects like AV/BV and AI/BI.
Let me know if you need more functions and we’ll get them into the TODO list.